Authors: Nguyen, K., Au, T.K.L., Hoang, V.P., Park, S.H., Park, H.C., Aerospace Science and Technology 118 (2021): 106990
Abstract: A flapping-wing micro air vehicle (FW-MAV) operating with aerodynamically optimal wing configuration and kinematics may save energy and thus prolong flight time. In this work, we use a computational-fluiddynamic method to investigate the effects of wing kinematics, corrugation structures, and clap-and-fling on the aerodynamic efficiency of our hovering two-winged FW-MAV (KUBeetle). From the measured reference wing kinematics, we generated several different wing kinematics, considering the effect of spanwise twist and chordwise camber that produce high lift-to-drag ratio (L/D). Among the investigated cases, the modified wing kinematics version 3, which includes both camber and twist with an average angle of attack of about 37◦, was selected, because of its ∼24% improvement of L/D, while maintaining similar lift to the measured reference wing kinematics. The results also showed that the camber plays a role in the improvement of both lift and L/D, which improvements are approximately (16.7 and 10.6)%, respectively. We then used wing kinematics version 3 to investigate the effects of various leading-edge corrugation structures. Based on the results of lift and L/D, we proposed a wing with distributed wing corrugations along the wingspan, which slightly augments the L/D by 2%. In addition, to see how the clap-and-fling behavior contributes to the aerodynamic efficiency, its effects on lift and drag generation were examined. We found that the clap-and-fling enhanced lift by 5%, but increased drag by 9%, resulting in a 4% reduction of the L/D for both the measured and the modified wing kinematics. Thus, the lift-augmented clap-and-fling is inefficient for FW-MAVs. Finally, the study confirmed that the wing with distributed wing corrugations using wing kinematics version 3 without clap-and-fling presented at the stroke reversals is preferable for the high aerodynamic efficiency of the KUBeetle robot, with 31% improvement in L/D. (View at publisher)
Aerial Robotics: Dynamic Flight Stability
Analysis of Hovering Flight Stability of An Insect-like Flapping-wing Robot in Martian Condition
Authors: Nguyen, K., Ha, G., Kang, T., Park, H.C., Aerospace Science and Technology 152 (2024): 109371
Abstract: In efforts to search for life-form on a planet other than Earth, many projects have been launched to measure and analyze the surface and atmospheric conditions on Mars. To extend the exploration of Mars, scientists have attempted to perform flight in the extremely thin air environment of Mars. Inspired by the successful controlled flight of NASA's Helicopter on Mars, in this work, we investigate the six-degrees-of-freedom hovering flight dynamics of an insect-like flapping-wing robot, called KUBeetle. To hover the KUBeetle on Mars, using the scaling ratios of air density and gravity on Earth and Mars, we have found that the flapping frequency should be about 113.48 Hz, which is 4.93 times faster than that on Earth, and the required lift on Mars is about 38% of that on Earth. The computational fluid dynamics (CFD) analysis suggests that the lift produced by the flapping wings at the frequency on Mars is close to that predicted by the scaling ratios. A series of simulations are used to compute the stability derivatives to complete the equations of motion. The eigenvalue and eigenvector analyses have identified one fast subsidence mode, one slow subsidence mode, and one divergence oscillation mode in the longitudinal and lateral motions on Mars, which are identical to those on Earth. The dynamic responses of the robot under three initial disturbances in the translational speeds indicate that due to the 94% smaller real part of the complex roots in the divergence oscillation modes of the longitudinal and lateral motions on Mars, the growth of flight disturbances is much slower than on Earth. Therefore, the KUBeetle is capable of hovering flight on Mars, since it has enough time to use the feedback controls to stabilize the system. This work can be used to support the studies of the flight control of flapping wing robots in the Martian atmospheric condition, and to generalize such flight control for other non-terrestrial applications in the atmospheres of other planets and/or their moons. (View at publisher)
Authors: Nguyen, K., Au, T.K.L., Phan, H.V., Park, H.C., Aerospace Science and Technology 119 (2021): 107085
Abstract: In this paper, we compare the characteristics of hovering stability for two insect-inspired flapping-wing micro air vehicles (FW-MAVs) with different strategies to generate control moments for the longitudinal and lateral attitude controls. The two robots were named according to their control mechanisms, i.e., the Stroke-Plane-Change (SPC), and the Trailing-Edge-Change (TEC). The forces and moments produced by flapping wings were computed by the computational fluid dynamics (CFD) method. The longitudinal and lateral flight characteristics were identified as one fast subsidence mode, one slow subsidence mode, and one divergence oscillation mode. The results revealed that the fast and slow subsidence modes in the longitudinal and lateral motions of the SPC were stabilized faster than those of the TEC, while both of the lateral and longitudinal divergence modes of the SPC were more unstable than those of the TEC. Moreover, the effect of the longitudinal and lateral derivatives on the system poles of the SPC were investigated. The results showed that the major source of instability in the longitudinal motion was the pitching derivative with respect to the horizontal speed, M+ u . Meanwhile, that in the lateral motion was the rolling derivative with respect to the horizontal side speed, L+ v . Overall, the time response of the SPC, when the body was disturbed by an external force, was relatively faster than that of the TEC. Therefore, using the SPC mechanism can give the FW-MAV more agility to operate in highly cluttered spaces with obstacles. (View at publisher)
Feasible Robot Designs: Multimodal Locomotion
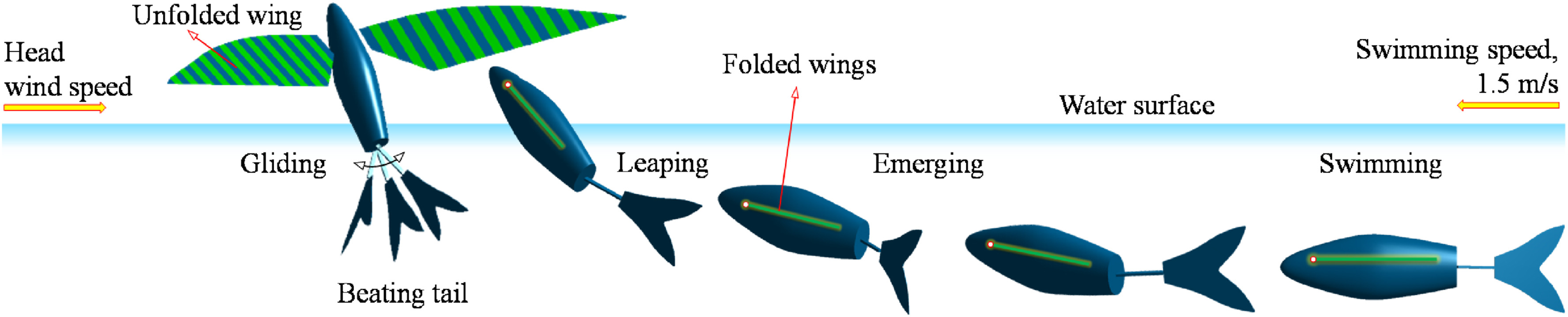
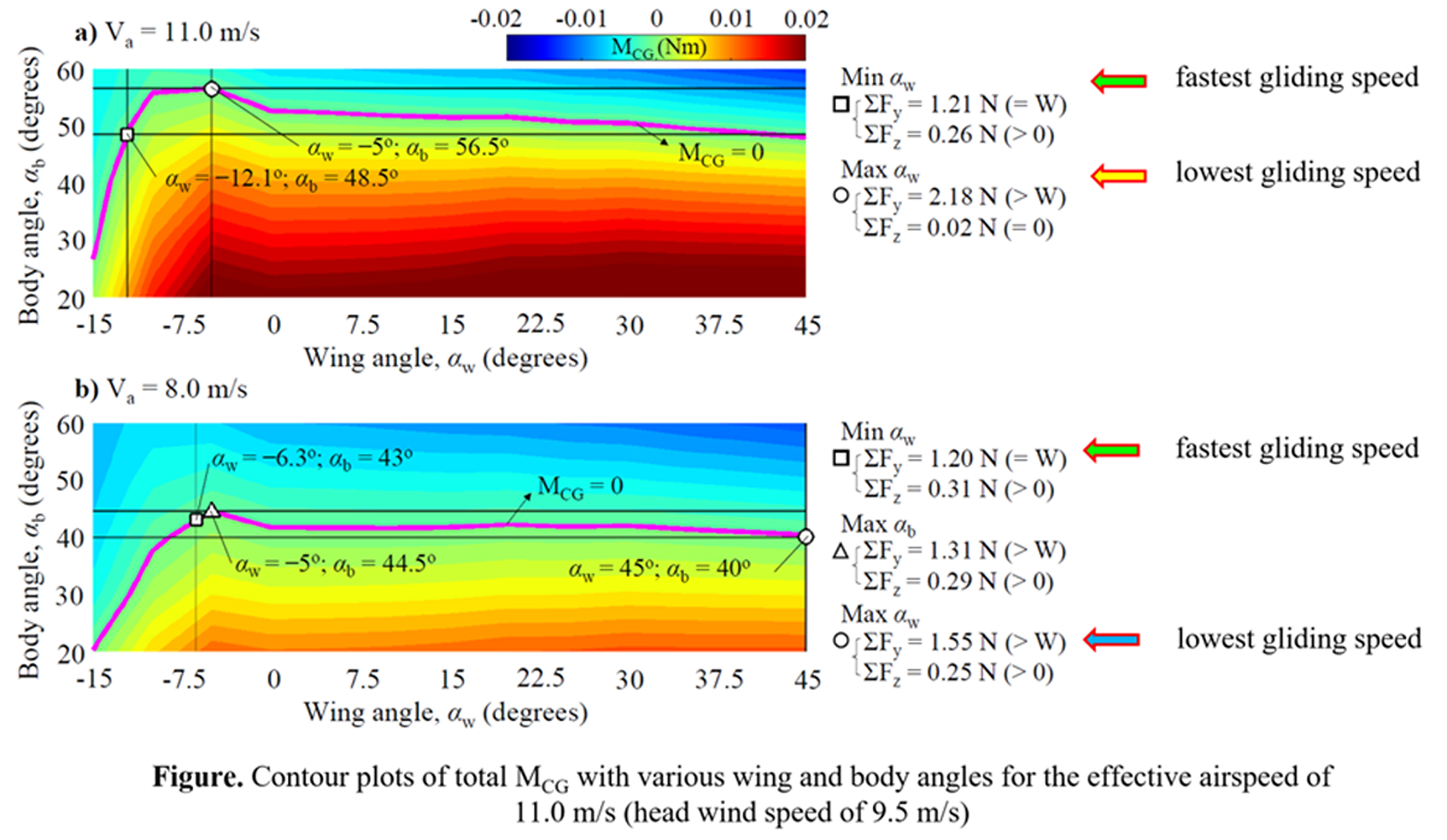
Feasibility Study on Mimicking the Tail-beating Supported Gliding Flight of Flying Fish
Authors: Nguyen, K., Park, H.C., Ocean Engineering 287 (2023): 115745
Abstract: Mimicking the unpowered gliding capabilities of flying fish is challenging, due to the various technical limitations that are involved in creating a dual-modal robot that can both swim underwater and fly in the air. In this work, we suggest a modified KUFish design equipped with a pair of foldable wings for gliding flight in the air. Although the current water-leaping speed of the KUFish is lower than that of flying fish, the robot may be able to lift off by taking advantage of a head wind and forces produced by tail-beating motion, compensating for its weight, and overcoming the drag. Our series of computational fluid dynamics simulations has shown that with the unfolded wings and fully submerged tail-beating motion, when the wing and body angles are maintained in specific ranges under the head wind speeds of (9.5 and 6.5) m/s, the robotic fish after water-leaping can perform efficient gliding flight without generating pitching moment. This work can also be used to explain how flying fish perform gliding flight under tail-beating motion, and to develop an actual model of the dual-modal robot that mimics flying fish in the future. (View at publisher)
Underwater Robotics: Design, Fabrication and Demonstration
Authors: Nguyen, K. and Park, H.C., Available at SSRN (2025): 5920304
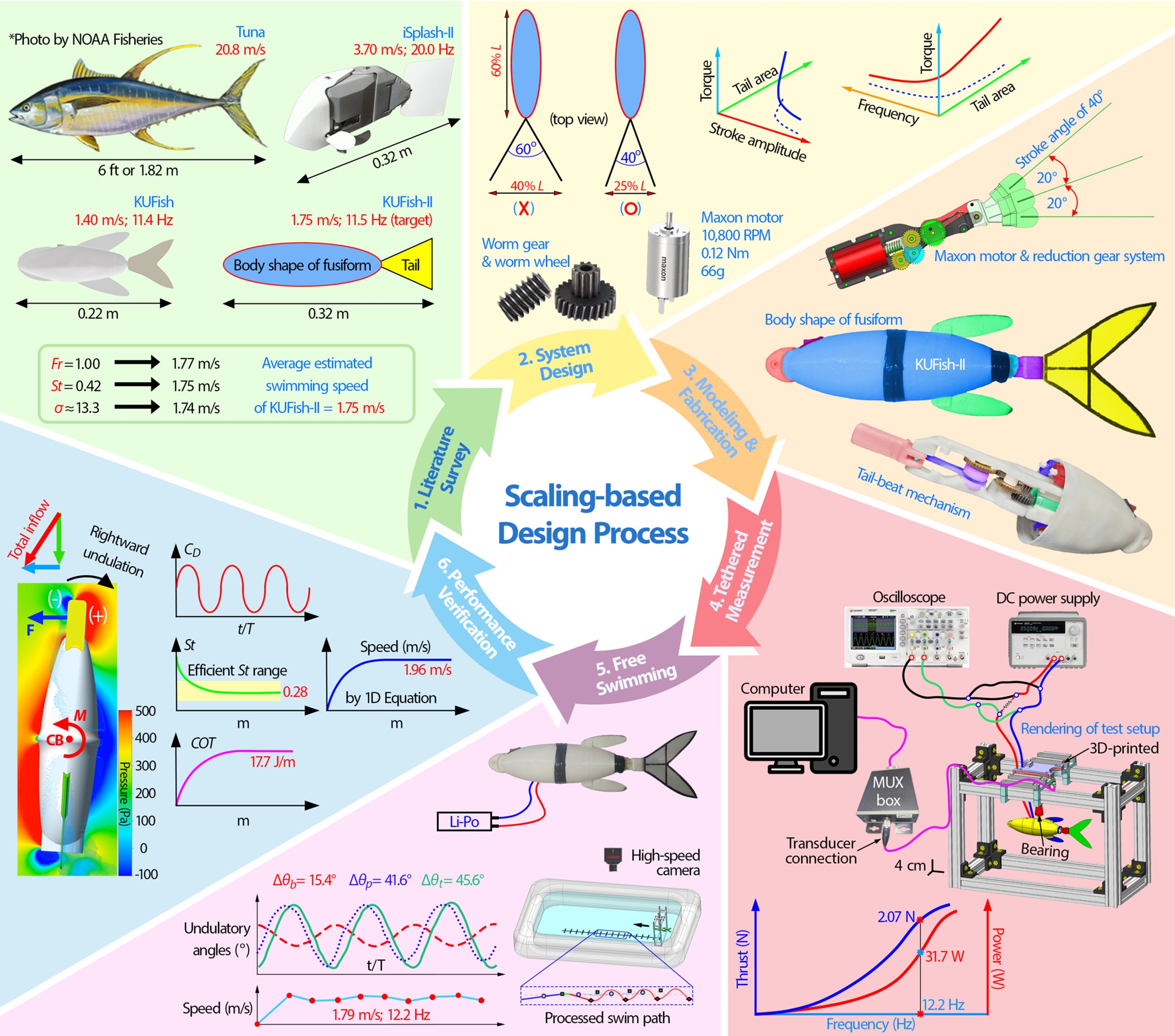
Abstract: The synchronous integration of multiple parameters in developing high-speed robotic fish remains a challenge. Consequently, most existing fish-like robots have been created through trial-and-error methods. This paper presents a comprehensive scaling-based design approach for developing a 0.32-m-long robot, KUFish-II, capable of achieving a target speed of 1.75 m/s or 5.5 body lengths per second (BL/s). This speed was predicted based on three physical parameters: Froude number, Strouhal number, and reduced frequency. To design a robot capable of achieving the speed, the proposed scaling law specified the stroke amplitude, fin area, tailbeat frequency, and torque needed for required thrust generation and high swimming efficiency. Subsequent experiments showed good agreement between the measured and predicted thrusts, frequencies, and swimming speeds. Swimming at a maximum speed of 1.79 m/s (5.6 BL/s), with a low Strouhal number and a narrow peak-to-peak amplitude of the tail, KUFish-II can be regarded as one of the few fast-swimming robots capable of achieving efficient locomotion with a low cost of transport. These results confirm the reliability of the proposed approach and highlight its potential use for designing efficient, largescale, fast-swimming robotic fish. (View at publisher)
A Robotic Fish Capable of Fast Underwater Swimming and Water Leaping with High Froude Number
Authors: Pham, T.H., Nguyen, K., Park, H.C., Ocean Engineering 268 (2023): 113512
Abstract: Natural underwater species outperform man-made underwater vehicles in many aspects. In this work, as our first effort to eventually mimic flying fish, a robotic fish capable of swimming fast and leaping out of water was developed, named KUFish. The thrust of KUFish was produced by a tail-beating mechanism driven by a DC motor in combination with reduction gears, four-bar linkage, and pulley-string mechanisms. The passive dynamic stability was implemented by the symmetric mass distribution, positive buoyancy, and lower center of gravity. A series of swimming experiments indicated that the KUFish could swim 0.68 m and leap out of the water with a speed of 1.35 m/s (6.1 BL/s) at an instant of 0.68 s after release. In addition to experimentation, a two-dimensional dynamic model was developed to predict the swimming behavior of the robot. The proposed dynamic model could reasonably capture the measured swimming performance of the robot before water leaping. The water leaping capability of the KUFish can be well supported by the computed Froude number of (1.08 or 0.92) in terms of the body faring length or robot length, respectively. The results from the current work can be useful for developing a flying-fish-like swimming robot in the future. (View at publisher)
